| Друзья сайта |
 Форум поддержки программ "Tiny Tools" (CPLD/USB-S/USB-F/USB-SPI EJTAG Tiny Tools) Форум поддержки программ "Tiny Tools" (CPLD/USB-S/USB-F/USB-SPI EJTAG Tiny Tools) Электроника на KitPost Электроника на KitPost |
| Наш опрос |
Оцените мой сайт
Всего ответов: 86
|
|
|
Инфракрасная паяльная станция своими руками на ARDUINO
| |
| Alexandr_ | Дата: Среда, 08.02.2017, 19:55 | Сообщение # 1 |
 Генералиссимус
Группа: Администраторы
Сообщений: 822
Статус: Offline
| Форумчане, куплю-продажу и личные сделки выяснять в личке, либо в новом форуме, этот форум для вопросов по электронной части станции.
Архив по станции от hominidae с проектом efimsu ->здесь Проект Леонида, Leonid0071 "UNO-MAX6675-PC" и его доработки на форуме Амперки -> скачать
Люби грешников, ненавидь сам грех!
|
| |
|
| Пользователи поблагодарившие Alexandr_ за этот пост: |
|
|
| snmar4enko | Дата: Пятница, 11.05.2018, 07:01 | Сообщение # 136 |
|
Лейтенант
Группа: Пользователи
Сообщений: 68
Статус: Offline
| Цитата mon (  ) там нет 16bit таймера?
Я конешно понимаю что в протеусе намного быстрей все проверить - но пока не освоил этот инструмент моделирую в голове и проверяю на реальном железе. А оно немного отличается от моделирования. Взгляните на ваши осциллограммы. С отрицательным импульсом (активный ноль) можно совладать. Но опережение управляющего импульса - при 1000 залезет в соседнюю полуволну. Это не так опасно как при задержке но все же.Цитата snmar4enko ( ) Уменьшил время опроса ПИД до 50 микросекунд.
В предыдущих версиях ветки 2.0.* он был 100 милисекунд.
Добавлено (11.05.2018, 06:48)
---------------------------------------------
Цитата mon ( ) Если правильно выбраны коэффициенты ПИД то рано или поздно наступит установившийся режим ПИД. Так вот этот установшийся режим наступает за 10, а чтобы наверняка за 100 циклов вычисления ПИД. Время через которое вычисляется ПИД совпадает с временем диффиринцирования и интегрирования составляющих ПИД регулятора. Теперь про ШИМ или фазовый регулятор: его период должен быть меньше или равен периоду опроса ПИД.
Добавлено (11.05.2018, 07:01)
---------------------------------------------
Цитата snmar4enko ( ) Я двумя руками за PID регулирование - но оно у нас не работает!!!!!!!!!!!!!!Медленный ШИМ с периодом 1 секунда. Значения PID регулирования в регулятор подставляются 100 раз в секунду. Теоретически к примеру если ПИД устанавливает мощность 20% то 20 раз включится и 80 раз будет выключен, причем включение - выключение могут произвольно чередоваться. PID должен опрашивается согласно его библиотеке 10 раз в секунду, фактически 3-100 раз в секунду. Полноценная работа ШИМ регулятора когда опрос ПИД 1 раз в секунду. Тогда и будет идеальная работа программы. Но не забываем про инерционность нагревательных элементов (Утюг, инфракрасная керамика, лампы). Они медленно нагревают плюс медленная отработка ПИД (1 раз в секунду) что мы получим если на первом и третьем этапах пайки необходимо обеспечивать нагрев со скоростью 1 градус в секунду. Прошу также учесть что что если время увеличено в 10 раз от номинального то Интегральная составляющая в 10 раз больше, а Диффиринциальная в 10 раз меньше. Уменьшение - фиг с ним. А вот Диффиринциальная составляющая может стать всемогущей. К примеру мы установили Ki чтобы увеличивало на 1% при 1 градусе разности. Увеличение времени в 10 раз меняет эту составляющую на 10% мощности при 1 градусе ошибки. Если наш термопрофиль требует увеличивать на градус в секунду то при следующем опросе PID ошибка градусов будет 1.5 или более. Соответственно добавка 15% мощности к прошлым 10%. Нижней нагреватель у меня 1.8 квт, 25% мощности это 450вт - не хилый нагрев получаем с некоторым опозданием.
Случай когда опрос ПИД приближается к 100 разам в секунду - ШИМ практически не работает - получается как бы разрыв цепи регулирования. Параллельно с этим Интегральная составляющая выростает в 10 раз. Ее значение немного меньше чем Диффиринциальная составляющая при 1 секундном опросе. Но все равно ощутимо.
А разыв цепи регулирования увеличивает ошибку и соотвественно изменение выходного параметра ПИД.
На форуме goo.gl/tuFa9D обсуждают нашу станцию и ту которую сами параллельно написали с тех же исходников что и у нас. Анализируя код - по крайней мере для LCD2004 индикатора - получаем что для управления регулятором (твердотельное реле или симмисторный аналог) используют 20 значений мощности. При этом ПИД вычисляет 100 значений - с избытком в 5 раз, без привязки ко времени опроса - молотит на максимуме (где-то 100-500 раз в секунду - теоретически). И что из этого получается: что принципы которое я и собрал выше выполняются хоть и грубо (20 значений) в отличии от станции KSAA в которой только 2 значения: 0 или 1 в смеси с биением частот ШИМ и Сети.
Сообщение отредактировал snmar4enko - Пятница, 11.05.2018, 07:28 |
| |
|
| Пользователи поблагодарившие snmar4enko за этот пост: |
|
|
| mon | Дата: Пятница, 11.05.2018, 07:11 | Сообщение # 137 |
|
Подполковник
Группа: Модераторы
Сообщений: 191
Статус: Offline
| Цитата snmar4enko ( ) Теперь представим что у нас мощность имеет 1000 значений - точность 0.1 процента - но эти значения задает ПИД - и ему при тех же коэффициентах необходимо время в 5 раз дольше чтобы придти к установившемуся режиму |
| |
|
| Пользователи поблагодарившие mon за этот пост: |
|
|
| snmar4enko | Дата: Пятница, 11.05.2018, 07:37 | Сообщение # 138 |
|
Лейтенант
Группа: Пользователи
Сообщений: 68
Статус: Offline
| Цитата mon ( ) Как раз ПИДу будет гораздо легче,так как появляется возможность привести коэффициенты к целым числам,а значит увеличить скорость выполнения самой функции,меньше кода,реже вызывать,короче одни плюшки.
Округление разности температур умноженное только на целый коэффициент - уже (приближение) ошибка, а Диффиринциальная составляющая тупо прибавление к установившемуся значению мощности единицы или убавление если знак другой. Давайте не забывать что диффиринциальная составляющая как раз и отвечает за установившийся режим. Снова допустим что у нас 1000 значений мощности - следовательно в худщем случае нужно 1000 периодом чтобы установить значение на выходе ПИД.
Допустим мы будем использовать переменные INT и подразумевать что все значения ПИД деситикратные. Но для этого необходимо будет температуру, которая у нас 12 бит преобразовывать и умножать на 10 перед подачей в ПИД. Далее в ячейке EEPROM может хранится значение от 0 до 255, если не использовать несколько ячеек для хранения значения. Посмотрите ранее сколько возмущений из за того что в памяти уже хранятся 2х, 12и, 10и, 100о кратные значения. Допустим температуру от 150 до 255 для верхнего нагревателя тоже необходимо будет умножать на 10 перед подачей в ПИД. Ну Бог с ней с той температурой - допустим не мы будем возится с умножением температуры - но тогда разность температур в 0.5 градуса и мение не будет никак влиять на ПИД и это равносильно разрыву цепи регулирования и приведет колебаниям на определенном уровне для мощности. Нам такое не нужно .... Даст ли это эффект быстродействия чтобы быстрее опрашивать ПИД?
Скажу вам следующее - в борьбе с длинными переменными где-то урезал и переменную отвечающую за градусы, теперь не могу понять какую именно и теперь время от времени возникают те колебания мощности на определенном уровне. А казалось что там те 0.1-0.5 градуса - на что могут повлиять ....
Сообщение отредактировал snmar4enko - Пятница, 11.05.2018, 08:12 |
| |
|
| Пользователи поблагодарившие snmar4enko за этот пост: |
|
|
| Dmitrysh | Дата: Пятница, 11.05.2018, 09:29 | Сообщение # 139 |
|
Рядовой
Группа: Пользователи
Сообщений: 3
Статус: Offline
| Цитата snmar4enko ( ) то есть 200Гц. И это работает несмотря на переменную 100 милисекунд в самой библиотеке ПИД.
Цитата snmar4enko ( ) Скажу вам следующее - в борьбе с длинными переменными где-то урезал и переменную отвечающую за градусы, теперь не могу понять какую именно и теперь время от времени возникают те колебания мощности на определенном уровне. А казалось что там те 0.1-0.5 градуса - на что могут повлиять ....
|
| |
|
| Пользователи поблагодарившие Dmitrysh за этот пост: |
|
|
| snmar4enko | Дата: Пятница, 11.05.2018, 10:47 | Сообщение # 140 |
|
Лейтенант
Группа: Пользователи
Сообщений: 68
Статус: Offline
| версия 2.0.9
Цитата Dmitrysh ( ) Вот эти посмотрите
Код
int tc1;
int tc2; |
| |
|
| Пользователи поблагодарившие snmar4enko за этот пост: |
|
|
| Cinema | Дата: Воскресенье, 13.05.2018, 14:48 | Сообщение # 141 |
 Генерал-майор
Группа: Проверенные
Сообщений: 618
Статус: Offline
| Как-то здесь проскальзывала информация о станции от dmingo:
Станция сочетает в себе ИК низ и фен сверху. Организовано управление почти как у mvm_ksaa, т.е. есть ардуинка и есть прикольный софт для ПК.
"Опыт — это то, что получаешь, не получив того, что хотел" © интернет
Сообщение отредактировал Cinema - Воскресенье, 13.05.2018, 14:57 |
| |
|
| Пользователи поблагодарившие Cinema за этот пост: |
|
|
| Cinema | Дата: Воскресенье, 13.05.2018, 15:08 | Сообщение # 142 |
|
Генерал-майор
Группа: Проверенные
Сообщений: 618
Статус: Offline
| еще файлы из архива по станции dmingo:
"Опыт — это то, что получаешь, не получив того, что хотел" © интернет
Сообщение отредактировал Cinema - Воскресенье, 13.05.2018, 15:11 |
| |
|
| Пользователи поблагодарившие Cinema за этот пост: |
|
|
| Cinema | Дата: Воскресенье, 13.05.2018, 15:17 | Сообщение # 143 |
|
Генерал-майор
Группа: Проверенные
Сообщений: 618
Статус: Offline
| в папку vozdelsistema нужно закинуть звуки из архивов ниже:
"Опыт — это то, что получаешь, не получив того, что хотел" © интернет
Сообщение отредактировал Cinema - Воскресенье, 13.05.2018, 15:18 |
| |
|
| Пользователи поблагодарившие Cinema за этот пост: |
|
|
| snmar4enko | Дата: Понедельник, 14.05.2018, 11:28 | Сообщение # 144 |
|
Лейтенант
Группа: Пользователи
Сообщений: 68
Статус: Offline
| Видел я этот проект. Давно. Аналогично с нами те же датчики на MAX6675 и LCD1602. С подогревом понятно - тупо включил выключил из компьютера по измеренной температуре.
С феном вообще непонятка, зачем ПИД в ардуине, причем с выходной шкалой от 0 до 1000 и передергиванием ручного-автоматического режимов ПИД. Такая шкала ПИД становится понятной когда начинаем разбирать код регулирования фена. А что такой ШИМ с 1 секундным периодом вполне подойдет для ветки 1.4.* с твердотельным реле. Хотя у нас такой же, но с учетом ограничения мощности. При сравнении ШИМ с работой сети получаем 100% шкалу мощности, неплохо. Но 10 кратное повышение шкалы ПИД требует 10 кратного увеличения коэффициентов ПИД для обеспечения аналогичной скорости регулирования ПИД.
Для чего включается ручной режим ПИД? Не понятно.
|
| |
|
| Пользователи поблагодарившие snmar4enko за этот пост: |
|
|
| Cinema | Дата: Вторник, 29.05.2018, 23:16 | Сообщение # 145 |
|
Генерал-майор
Группа: Проверенные
Сообщений: 618
Статус: Offline
| snmar4enko приветствую.
Смотрел ваш 2.0.5 и обратил внимание на это:
Код byte intefan = 20; //внутренний вентилятор на А6
byte extefan = 21; //внешний вентилятор на А7
Цитата “2 Additional Multiplexed Single EndedInputChannels (TQFP and QFN/MLF Package only)”
"A6 & A7 are analog input only. Youcannot digital write to them. "
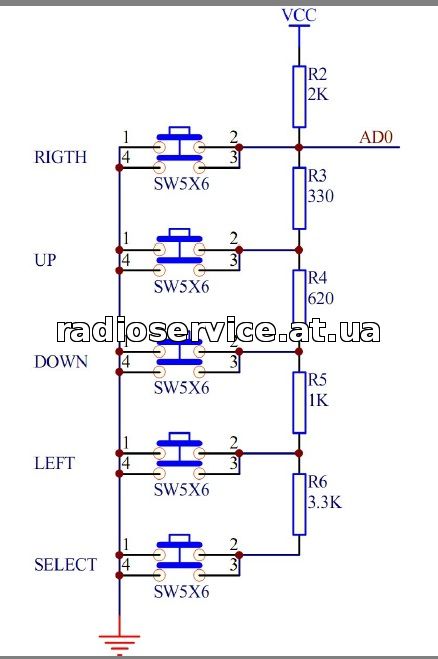
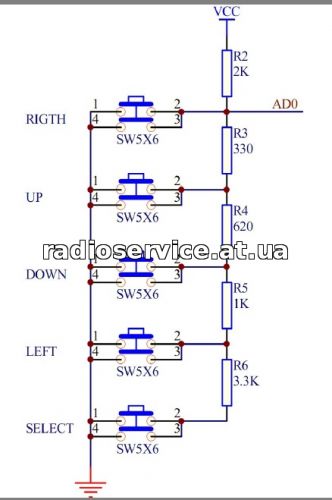
Аналоговые кнопки и вычисление их значений:
Не понимаю, т.к.у вас:
Код //Назначаем пины кнопок управления
byte upSwitchPin = 14;
byte downSwitchPin = 15;
byte cancelSwitchPin = 16;
byte okSwitchPin = 17;
//состояние кнопок по умолчанию
boolean upSwitchState = false;
boolean downSwitchState = false;
boolean cancelSwitchState = false;
boolean okSwitchState = false;
//переменные для кнопок
long ms_button = 0;
boolean button_state = false;
boolean button_long_state = false;
boolean button_state1 = false;
boolean button_long_state1 = false; Код void loop()
{
//Считываем состояние кнопок управления
upSwitchState = !digitalRead(upSwitchPin);
downSwitchState = !digitalRead(downSwitchPin);
cancelSwitchState = !digitalRead(cancelSwitchPin);
okSwitchState = !digitalRead(okSwitchPin);
А у vector99 -
Код //--------настройка кнопок управления------------------------------------
//#define A_PINS_BASE 100 // номер с которого начинается нумерация наших "псевдо-кнопок".
#define PIN_RIGHT 100
#define PIN_UP 101
#define PIN_DOWN 102
#define PIN_LEFT 103
#define PIN_SELECT 104
struct A_PIN_DESC{ // определяем структуру которой будем описывать какое значение мы ожидаем для каждого псевдо-пина
byte pinNo; // номер пина
int expectedValue;// ожидаемое значение
};
A_PIN_DESC expected_values[]={ // ожидаемые значения для псевдо-кнопок
{ PIN_RIGHT,202},
{ PIN_UP,429},
{ PIN_DOWN,298},
{ PIN_LEFT,563},
{ PIN_SELECT,758}
};
#define A_PINS_COUNT sizeof(expected_values)/sizeof(A_PIN_DESC) // вычисляем сколько у нас всего "псевдо-кнопок" заданно.
#define A_POSSIBLE_ABERRATION 50 // допустимое отклонение analogRead от ожидаемого значения, при котором псевдо кнопка считается нажатой
bool digitalReadA(byte pinNo){
for(byte i=0;i<A_PINS_COUNT;i++){ // ищем описание нашего всевдо-пина
A_PIN_DESC pinDesc=expected_values[i];// берем очередное описание
if(pinDesc.pinNo==pinNo){ // нашли описание пина?
int value=analogRead(A0); // производим чтетине аналогово входа
return (abs(value-pinDesc.expectedValue)<A_POSSIBLE_ABERRATION); // возвращаем HIGH если отклонение от ожидаемого не больше чем на A_POSSIBLE_ABERRATION
}
}
return LOW; // если не нашли описания - считаем что пин у нас LOW
}
//Назначаем пины кнопок управления
int upSwitchPin = PIN_UP;
int downSwitchPin = PIN_DOWN;
int cancelSwitchPin = PIN_LEFT;
int okSwitchPin = PIN_SELECT;
//состояние кнопок по умолчанию
int upSwitchState = 0;
int downSwitchState = 0;
int cancelSwitchState = 0;
int okSwitchState = 0;
//переменные для кнопок
long ms_button = 0;
boolean button_state = false;
boolean button_long_state = false; Код void loop()
{
//Считываем состояние кнопок управления
upSwitchState = digitalReadA(upSwitchPin);
downSwitchState = digitalReadA(downSwitchPin);
cancelSwitchState = digitalReadA(cancelSwitchPin);
okSwitchState = digitalReadA(okSwitchPin);
//----------------------------------------------------------------------------------
Спасибо.
P.S.: В принципе, меня вполне устроил бы термостат для НИ, вместо ПИД. Например, как mvm_ksaa реализовал:
Для бюджетной станции не зазорно отрабатывать термопрофиль силами только ВИ, при достижении платой нужной температуры (а способ достижения её можно любой, не превышающий прирост температуры более 1*С/сек, применить)...
"Опыт — это то, что получаешь, не получив того, что хотел" © интернет
Сообщение отредактировал Cinema - Вторник, 29.05.2018, 23:48 |
| |
|
| Пользователи поблагодарившие Cinema за этот пост: |
|
|
| snmar4enko | Дата: Пятница, 01.06.2018, 09:21 | Сообщение # 146 |
|
Лейтенант
Группа: Пользователи
Сообщений: 68
Статус: Offline
| Цитата Cinema ( ) Смотрел ваш 2.0.5
В плане аналоговых кнопок - вполне все реально - писать скетч аналогового чтения - получаешь значения от 0 до 1023. Далее нормируешь по условию - к примеру от 900 до 1023 - не нажата ни одна кнопка, от 0 до 100 RIGHT, и т д. - перед тем как писать условия нужно померять значения аналогового чтения- резисторы могут быть разными и как то шкалу поделить приблизительно пополам между значениями кнопок.
Цитата Cinema ( ) плата ZCC на PC814? |
| |
|
| Пользователи поблагодарившие snmar4enko за этот пост: |
|
|
| Dmitrysh | Дата: Пятница, 01.06.2018, 09:57 | Сообщение # 147 |
|
Рядовой
Группа: Пользователи
Сообщений: 3
Статус: Offline
| Цитата В плане аналоговых кнопок - вполне все реально - писать скетч аналогового
чтения - получаешь значения от 0 до 1023. Далее нормируешь по условию |
| |
|
| Пользователи поблагодарившие Dmitrysh за этот пост: |
|
|
| Cinema | Дата: Пятница, 01.06.2018, 13:37 | Сообщение # 148 |
|
Генерал-майор
Группа: Проверенные
Сообщений: 618
Статус: Offline
| С I2C какраз проблема у меня на имеющейся плате Pro Mini 34pin. Не работают как SDA и SCL пины А4 и А5. Как аналоговые входы/выходы - работают, при этом светодиод подключенный к одному из этих пинов в blink работает. Однако если в blink назначить на А4, то светодиод также будет мигать и на А5,A0,A2,A3. Пин А7, как гласит даташит, может работать только на вход.
В итоге у меня остались: D3 и A1 = выходы на нагреватели, D4,D5,D6,D7,D8,D9 = для LCD1602, A4 = буззер, A6 = аналоговая клавиатура, D10,D11,D12,D13 = 2шт. MAX6675.
Т.е. простые 4шт. кнопки некуда приткнуть, и шину I2C дисплей с I2C нельзя использовать.
"Опыт — это то, что получаешь, не получив того, что хотел" © интернет
Сообщение отредактировал Cinema - Пятница, 01.06.2018, 13:39 |
| |
|
| Пользователи поблагодарившие Cinema за этот пост: |
|
|
| snmar4enko | Дата: Суббота, 02.06.2018, 09:22 | Сообщение # 149 |
|
Лейтенант
Группа: Пользователи
Сообщений: 68
Статус: Offline
| Цитата Cinema ( ) С I2C как раз проблема у меня на имеющейся плате Pro Mini 34pin
Код #include <Wire.h>
String stringOne;
void setup()
{
Wire.begin();
Serial.begin(9600);
while (!Serial);
}
void loop()
{
byte error, address;
int nDevices;
Serial.println("Scanning...");
nDevices = 0;
for(address = 1; address < 127; address++ )
{
Wire.beginTransmission(address);
error = Wire.endTransmission();
if (error == 0)
{
String stringOne = String(address, HEX);
Serial.print("0x"); Serial.print(stringOne); Serial.println(" ");
nDevices++;
}
else if (error==4)
{
Serial.print("Unknow error at address 0x");
if (address<16)
Serial.print("0");
Serial.println(address,HEX);
}
}
if (nDevices == 0)
Serial.println("No I2C devices found\n");
else
Serial.println("done\n");
delay(5000);
}
- в терминал напишет все что есть на шине.....
Про аналоговые кнопки - товарищ efimsu (архив есть в нашей шапке) уже крутил аналоговые кнопки:
Код int read_LCD_buttons(){ // read the buttons
adc_key_in = analogRead(0); // read the value from the sensor
// my buttons when read are centered at these valies: 0, 144, 329, 504, 741
if (adc_key_in > 1000) return btnNONE;
if (adc_key_in < 50) return btnRIGHT;
if (adc_key_in < 250) return btnUP;
if (adc_key_in < 450) return btnDOWN;
if (adc_key_in < 650) return btnLEFT;
if (adc_key_in < 850) return btnSELECT;
return btnNONE; // when all others fail, return this.
}
- как видим измерил значения аналогового входа при нажатии кнопок и тупо проусловил ......
Кстати в аналоговых кнопках как такового дребезга нет ..... так что можно упростить код (антидребез убрать)
|
| |
|
| Пользователи поблагодарившие snmar4enko за этот пост: |
|
|
| Cinema | Дата: Понедельник, 04.06.2018, 00:02 | Сообщение # 150 |
|
Генерал-майор
Группа: Проверенные
Сообщений: 618
Статус: Offline
| Библиотеки менял - пофигу ... Как и стандартный I2C scanner,ваш скетч выводит в монитор только "Scanning...".При этом адрес дисплея мне известен и на другой плате (Mega2560) с дисплеем проблем нет. У меня в Pro Mini этой A4,А5,A7,A0,A2,A3 стали работать, словно их все соединили параллельно, ипри этом у A4,A5 вырезали функцию I2C,а A7 не научился работатьна OUTPUT - я это пытаюсьдонести своими постами  . Только A1и A6 работают в штатномрежиме (A1 = ADC IN,OUT и A6 = ADC IN). . Только A1и A6 работают в штатномрежиме (A1 = ADC IN,OUT и A6 = ADC IN).
Пытаюсь разобраться с аналоговыми кнопками...
Добавлено (04.06.2018, 00:02)
---------------------------------------------
В общем, пересобрал я 2.0.5 под аналоговые кнопки. Всё нормально компилируется в IDE 1.6.3. Пины переназначил свои 15(A1) - верх, 20(A6) - резистивная аналоговая клава, Буззер на прежнем месте 18(A4), кулеры закомментировал.
Теперь о грустном:
Какой-бы пин я не назначал для верха, при подаче питания, после заставки, начинает моргать, примерно, 2Гц светодиод, подключенный вместо силовой верха.
При подаче питания, всегда сразу после заставки сначала на 1 секунду зажигается светодиод, включенный вместо силовой низа, затем так же делает светодиод, подключенный вместо силовой верха. А далее в IDLE уже моргает 2Гц светодиод, подключенный вместо силовой верха.
"Опыт — это то, что получаешь, не получив того, что хотел" © интернет
Сообщение отредактировал Cinema - Понедельник, 04.06.2018, 00:02 |
| |
|
| Пользователи поблагодарившие Cinema за этот пост: |
|
|
|